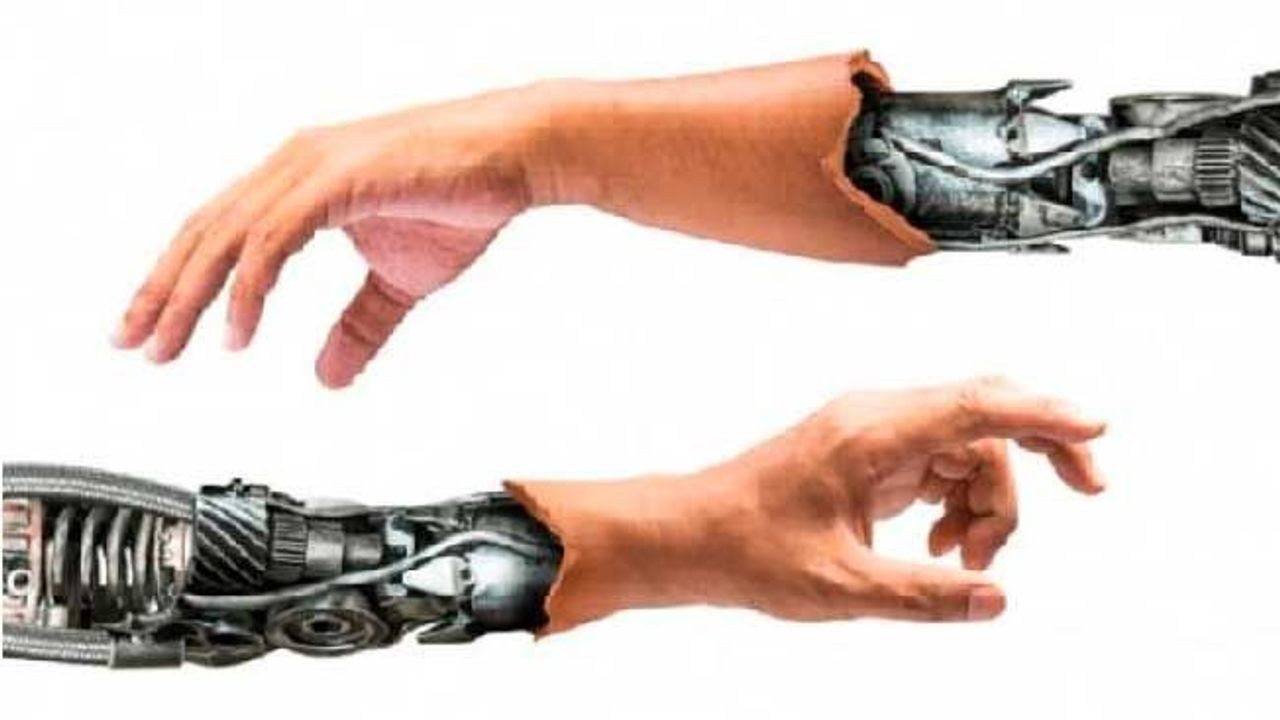
Japonya'nın Tokyo Üniversitesinden araştırmacılar, sıçanlardan alınan kas gözlerini (miyoblast), sentetik hidrojel tabakaları arasına yerleştirerek ürettikleri organik kas dokularını mekanik eklemlerle birleştirerek "biyo-hibrit" robot parmağı üretti.
Organik kas dokularının elektrik sinyalleri göndererek kasılıp gevşemesini sağlayan araştırmacılar, organik dokunun mekanik iskeletle uyumlu çalışmasını sağladı.
Bilim adamlarının buluşla ilgili yayınladıkları video görüntülerde robot parmağının plastik bir çerçeveyi kavradığı, çekip çıkardığı ve tekrar yerine koyduğu görülüyor.
Araştırmacılar bu basit hareket deneyinin daha gelişmiş biyo-hibrit robotlar yaratmak için iyi bir altyapı sağlayacağını belirtti.
Araştırmaya önderlik eden makine mühendisi SojiTakeuçi, "Eğer tüm bu kas dokularını tek bir cihaza entegre edebilirsek ellerin, kolların ve diğer beden kısımlarının çalışmasını taklit edebilen karmaşık kas grupları yaratabiliriz." ifadelerini kullandı.
Araştırmanın sonuçları "ScienceRobotics" dergisinde yayımlandı.
Organik kas dokularıyla robot parmağı üretildi
Japon bilim adamları, organik kas dokularını kullanarak dokuma ve kavrama hassasiyeti olan robot parmağı geliştirdi.
Bunlar da ilginizi çekebilir





Yorumlar